手机用户可
保存上方二维码到手机中,在
微信扫一扫中右上角选择“从
相册选取二维码”即可。
1、单项选择题 当代机器人主要源于以下两个分支()。
A.计算机与数控机床
B.遥操作机与计算机
C.遥操作机与数控机床
D.计算机与人工智能
点击查看答案
本题答案:C
本题解析:暂无解析
2、问答题 如图所示为具有三个旋转关节的3R机械手,求末端机械手在基坐标系{x0,y0}下的运动学方程。

点击查看答案
本题答案: 试题答案
试题答案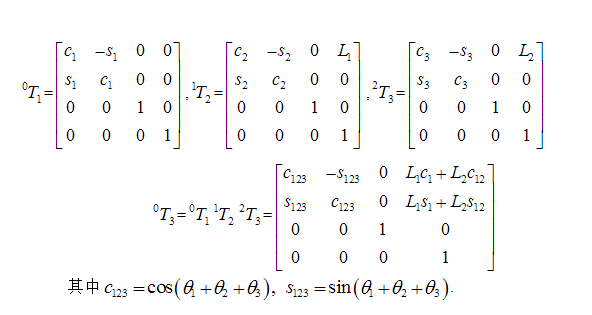
3、名词解释 虚功原理
点击查看答案
本题答案:约束力不作功的力学系统实现平衡的必要且充分条件是对结构
本题解析:试题答案约束力不作功的力学系统实现平衡的必要且充分条件是对结构上允许的任意位移(虚位移)施力所作功之和为零。
4、填空题 目前常用的传动件的定位方法有:电气开关()块定位和()。
点击查看答案
本题答案:定位机械挡;伺服定位系统
本题解析:试题答案定位机械挡;伺服定位系统
5、单项选择题 70年代末,机器人技术才得到巨大发展。80年代,计算机技术和传感器的发展推动了机器人的发展,它们都具有一定的()能力,90年代,小型轻型机器人开始出现,这类机器人能在特殊的环境中完成给定的任务。
A.一般
B.重复工作
C.识别判断
点击查看答案
本题答案:C
本题解析:暂无解析
6、问答题 什么是位置运动学、正向运动学和逆向运动学?
点击查看答案
本题答案:位置运动学仅考虑运动中的几何学问题,即不考虑运动与时间
本题解析:试题答案位置运动学仅考虑运动中的几何学问题,即不考虑运动与时间的关系。已知关节空间的关节变量,计算操作机在操作空间的手部位姿,称之为运动学正问题。反之,已知操作机在操作空间的手部位姿,求各关节变量的反变换,称之为运动学逆问题,也叫求手臂解。
7、单项选择题 人们实现对机器人的控制不包括什么?()
A.输入
B.输出
C.程序
D.反应
点击查看答案
本题答案:D
本题解析:暂无解析
8、名词解释 JUMP
点击查看答案
本题答案:跳到指定的标签或程序
本题解析:试题答案跳到指定的标签或程序
9、名词解释 DOUT
点击查看答案
本题答案:进行外部输出信号的ON、OFF
本题解析:试题答案进行外部输出信号的ON、OFF
10、判断题 手臂解有解的必要条件是串联关节链中的自由度数 等于或小于6。
点击查看答案
本题答案:错
本题解析:暂无解析
11、名词解释 NOP
点击查看答案
本题答案:空操作指令。
本题解析:试题答案空操作指令。
12、填空题 机器人系统的结构由机器人的机构部分、传感器组、控制部分及信息处理部分组成。感知机器人自身或外部环境变化是依靠()完成。
点击查看答案
本题答案:传感器组
本题解析:试题答案传感器组
13、名词解释 机器人工作载荷
点击查看答案
本题答案:机器人在规定的性能范围内,机械接口处能承受的最大负载量
本题解析:试题答案机器人在规定的性能范围内,机械接口处能承受的最大负载量(包括手部)。
14、多项选择题 对MOTOMAN机器人进行轴操作时,可以使用的坐标系有()。
A.直角坐标系
B.关节坐标系
C.圆柱坐标系
D.工具坐标系
E.用户坐标系
点击查看答案
本题答案:A, B, C, D, E
本题解析:暂无解析
15、多项选择题 控制点不变动作是指只改变工具姿态而不改变工具尖端点(控制点)位置的操作,下面()可以实现控制点不变动作。
A.关节坐标系
B.直角坐标系
C.圆柱坐标系
D.工具坐标 系
E.用户坐标系
点击查看答案
本题答案:B, C, D, E
本题解析:暂无解析
16、问答题 智能中型足球机器人踢球机构有哪几种形式?
点击查看答案
本题答案:(1)电机弹簧式(2)电磁铁式(3)飞轮式(4)汽缸式
本题解析:试题答案(1)电机弹簧式(2)电磁铁式(3)飞轮式(4)汽缸式(5)气动肌腱式
17、填空题 A.VR是A.TMEL(中文名)公司的()1997年发明的基于精 简指令集(RISC.)的单片机系列。
点击查看答案
本题答案:A.先生和V先生
本题解析:试题答案A.先生和V先生
18、填空题 按用途划分机器人分为:()、()。
点击查看答案
本题答案:工业机器人;特种机器人
本题解析:试题答案工业机器人;特种机器人
19、填空题 机器人控制系统按其控制方式可以分为()控制方式、()控制方式和()控制方式。
点击查看答案
本题答案:程序;适应性;人工智能
本题解析:试题答案程序;适应性;人工智能
20、判断题 格林(格雷)码被大量用在相对光轴编码器中。
点击查看答案
本题答案:错
本题解析:暂无解析
21、问答题 模拟再现
来源:91exam .org
点击查看答案
本题答案:复原历史的内 容和复原行动的跟踪记录,是对古人和今人智慧的同时
本题解析:试题答案复原历史的内容和复原行动的跟踪记录,是对古人和今人智慧的同时展示。《1405郑和下西洋》是尝试采用了新式纪录片的特点:以剧情片的观点以及多元观念对纪录片的渗透。“情景再现”是该片创作的主要特点。该片采用了顺叙和倒叙的手法,历史在演进的同时,又常常回到现实的时空中,一个闪回镜头又拉回到历史的记忆里,造成了时空的交错和跨越感。多条线索共同演绎,在历史与现实中灵活游走,富有历史感和现代感。正是在历史和现实的对接中,使观众能够意识到再现和表演的存在,从而意识到所 观看的纪录片既非历史剧,又非真实的史料记载,而只是一种模拟真实的再现。
22、问答题 在工业应用中,工业机器人主要分为哪几类?
点击查看答案
本题答案:弧焊机器人\点焊机器人\搬运机器人\装配机器人\喷涂机
本题解析:试题答案弧焊机器人\点焊机器人\搬运机器人\装配机器人\喷涂机器人\抛光机器人
23、单项选择题 为了获得非常平稳的加工过程,希望作业启动(位置为零)时:()。
A.速度为零,加速度为零
B.速度为零,加速度恒定
C.速度恒定,加速度为零
D.速度恒定,加速度恒定
点击查看答案
本题答案:A
本题解析:暂无解析
24、填空题 我国的机器人专家从应用环境出发,将机器人分为两大类,即工业机器人和()
点击查看答案
本题答案:特种机器人
本题解析:试题答案特种机器人
25、填空题 在机器人的正面作业与机器人保持()以上的距离。
点击查看答案
本题答案:300mm
本题解析:试题答案300mm
26、判断题 机器人、微机控制型缝纫机、自动对焦防颤型摄像机、装有微型计算机的电视机和电饭煲等因为其工作原理在本质上无运动,所以以上均不属于机电一体化的产品。
点击查看答案
本题答案:错
本题解析:暂无解析
27、单项选择题 由数控机床和其它自动化工艺设备组成的(),可以按照任意顺序加工一组不同工序与不同节拍的工件,并能适时地自由调度和管理。
A.刚性制造系统
B.柔性制造系统
C.弹性制造系统
D.挠性制造系统
点击查看答案
本题答案:B
本题解析:暂无解析
28、单项选择题 FMC是()的简称。
A.加工中心
B.计算机控制系统
C.永磁式伺服系统
D.柔性制造单元
点击查看答案
本题答案:D
本题解析:暂无解析
29、问答题 试述机器人视觉的结构及工作原理
点击查看答案
本题答案:机器人视觉由视觉传感器摄像机和光源控制计算器和图像处理
本题解析:试题答案机器人视觉由视觉传感器摄像机和光源控制计算器和图像处理机组成原理:由视觉传感器讲景物的光信号转换成电信号经过A/D转换成数字信号传递给 图像处理器,同时光源控制器和32摄像机控制器把把光线,距离颜色光源方向等等参数传递给图像处理器,图像处理器对图像数据做一些简单的处理将数据传递给计算机最后由计算器存储和处理。
30、名词解释 脱机编程
点击查看答案
本题答案:指用机器人程序语言预先进行程序设计,而不是用示教的方法
本题解析:试题答案指用机器人程序语言预先进行程序设计,而不是用示教的方法编程。
题库试看结束后
微信扫下方二维码即可打包下载完整版《
★机械工程》题库
手机用户可保存上方二维码到手机中,在微信扫一扫中右上角选择“从相册选取二维码”即可。
题库试看结束后
微信扫下方二维码即可打包下载完整版《
机械工程:工业机器人》题库,
分栏、分答案解析排版、小字体方便打印背记!经广大会员朋友实战检验,此方法考试通过率大大提高!绝对是您考试过关的不二利器!手机用户可
保存上方二维码到手机中,在
微信扫一扫中右上角选择“从
相册选取二维码”即可。




