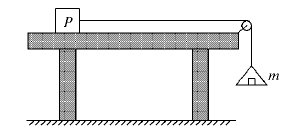
1��ѡ���� ��ͼ,P��λ��ˮƽ�Ĵֲ������ϵ����.�ÿ�������ֵ�������P��С������,С����������,С���������������Ϊm.��P�˶��Ĺ�����,�����ƿ�������,�����P��ˮƽ�����ܵ�������������Ӧ��ʩ������,����˵����ȷ����(? )
A��������Ħ����,ʩ�������ǵ��������
B��������Ħ����,ʩ����������������
C������mg��Ħ����,ʩ�������ǵ��������
D������mg��Ħ����,ʩ����������������
�ο��𰸣�B
������������P�ڴֲ��������˶�������,������ֱ����,ʩ�������ǵ���;�����������ĵ���,������ֱ����,ʩ������������;������,����ˮƽ����,ʩ����������;�ܻ���Ħ����,����ˮƽ����,ʩ������������.��ѡB.
�����Ѷȣ���
2��ʵ���� (9��)��ͼ��ʾ��ijʵ��С��ͬѧ����DISʵ��װ���о�֧�������ķֽ⣬A��BΪ������ͬ��˫���������������ͺŴ��������ܵ�����ʱ����Ϊ�����ܵ�ѹ��ʱ����Ϊ����A�����������Ƶ�ϸ�������ع̶��İ���Բ�����ƶ���B�̶�������ͨ���⻬�������ӳ�0.3m�ĸˣ���ϸ�������ڸ˵��Ҷ�O�㹹��֧�ܣ����ָ���ˮƽ�������²��������
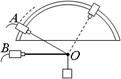
�ٲ���������ˮƽ�˵ļнǡ�AOB���ȣ�?�ڶ��������������е��㣻
������һ������O������һ�����룬��¼�����������Ķ����� ��ȡ�¹��룬�ƶ�������A�ı�Ƚǡ�
�ظ�����ʵ�鲽�裬�õ�����
F1/N
| 1.001
| 0.580
| ��
| 1.002
| ��
|
F2/ N
| ��0.868
| ��0.291
| ��
| 0.865
| ��
|
��
| 30��
| 60��
| ��
| 150��
| ��
|
�Ÿ��ݱ������ݣ�A��������Ӧ���DZ�����?(ѡ�F1����F2��)����������Ϊ?kg(����һλ��Ч����)��
�Ʊ�ʵ���ж�β����Դ��������е��㣬�Դ˲���˵����ȷ����?��
A����Ϊ�������ǵ���
B����ʱ�����ʵ����û��Ӱ��
C��Ϊ������������������Խ����Ӱ��
D��������ȫ����ʵ������
�ο��𰸣���F1��0.05����C
�������������ֻ��ʩ���������˼ȿ���ʩ��������Ҳ����ʩ��ѹ�������ձ��������ݿ�֪��F1ֻ����ֵ����F2������ֵ�����и�ֵ������A��������Ӧ���DZ�����F1������Ϊ��ͨ���⻬�����봫����B��������ˣ����ϵĵ�������һ�����Ÿˣ��Խ��O����ƽ�������У�F1sin�ȣ�mg�������������ݴ��룬��ã�m��0.05kg��
��ʵ�鲽������ȷ�ἰ���������������е��㣬��ʵ���ж�β����Դ��������е��㣬��ѡ��A������ÿ�β��������в��ܽ��е����������Ӧ��ʵ��֮ǰ���㣬��ѡ��B����ʵ���д�����������ˮƽ�˵ļнǵIJ���������ʱ������żȻ���������������ȵ���ʹ��ʵ���д�����ϵͳ����ʵ��������Dz��ɱ���ģ���ѡ��D����ѡ��C˵����ȷ��
�����Ѷȣ�һ��
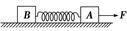
3��ѡ���� ��ͼ��ʾ����ȫ��ͬ�������A��B��������Ϊ1 kg��������Ķ�Ħ��������Ϊ0.2������֮��������һ����ϵ��Ϊ100 N/m���ᵯ�ɣ�����ϵͳ����ˮƽ�����Ͼ�ֹ���������ɴ��� ԭ��������һˮƽ���ҵı���F���������A�ϣ�F��0��ʼ����������3 Nʱ���ᵯ�ɵ��쳤��Ϊ(����)
ԭ��������һˮƽ���ҵı���F���������A�ϣ�F��0��ʼ����������3 Nʱ���ᵯ�ɵ��쳤��Ϊ(����)
ͼ2��12
A��0
B��1 cm
C��2 cm
D��3 cm
�ο��𰸣�
�����������ѡB.�ȶ���������������Ҫʹ�������˶�������˷���������Ħ����fmax��2mg����4 N>F��3 N����B���ܱ��־�ֹ������F����A�ܵ������Ħ����fmax��2 N��F����������2 NʱA�����˶���֮���쳤��������T��F��fmax��1 Nʱ����B��ƽ��������֪�ܵ���Ħ����Ϊ1 N�����ݺ��˶��ɣ����ɵ��쳤����x��T/k��0.01 m��1 cm��B�ԣ��������������������ƽ��������Ӧ�á����巨������������
�����Ѷȣ���
4��ʵ���� ����ʱ���ĵ�ԴƵ��Ϊ50Hzʱ������ÿ�� _______s��һ���㡣���ô���ʱ���ⶨ������ٶȣ���ʵ�ʵĵ�ԴƵ�ʵ���50Hzʱ�������50Hz�����㣬���õ��ٶ�ֵ������ʵֵƫ?��
�ο��𰸣�0.02???��?
�����������
�����Ѷȣ���
5��ʵ���� (1)�ڡ�̽������ƽ���ı��ζ���ʵ���У�����ʵ��Ҫ����ȷ����?
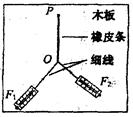
A�����ɲ����Ƶ��������������ľ��ƽ��
B�������ɲ����Ƶ���������������ֱ
C������ʱ������Ӧ���Ե��ɲ����ƵĿ̶�
D��ʹ�õ��ɲ�����ʱ�����ܳ���������





 �����ʰ�
�����ʰ�






 ?��
?�� ?�ۿ�ʼ�ͷ�ʱ���ٶȲ�Ϊ��?�����㵽Բ�����ĵľ���l���ƫС?������ƽ���СԲ����������ʵ��ֵС?��СԲ���ͷ�ʱ��ˮƽ�ߵ��Ϸ�
?�ۿ�ʼ�ͷ�ʱ���ٶȲ�Ϊ��?�����㵽Բ�����ĵľ���l���ƫС?������ƽ���СԲ����������ʵ��ֵС?��СԲ���ͷ�ʱ��ˮƽ�ߵ��Ϸ� ��ֻҪ����
��ֻҪ���� ����
���� ����
���� ������
������