1������� ����ѡ��ģ������˾����������֣����Ƿֱ��Ǵ���������������ִ������ģ������˵Ŀ������ڴ���5�ֿ��Ʒ�������ʹ�õĴ�����������5�࣬�б����£�
| ��� | ���Ʒ��� | ��� | ������
01
��ʱ����
01
λ�ƴ�����
02
�ӳٿ���
02
��������
03
���롱�ſ���
03
�¶ȴ�����
04
�����ſ���
04
�����
05
���ǡ��ſ���
05
�Ŵ�����
|
ִ����ģ��ΪС��ģ�顢�綯��ģ�飮
ijͬѧҪ���һ��װ�ã����й�������������ʱ���綯���Ż�ת����Ӧѡ��Ŀ������ʹ�������ŷֱ�Ϊ��������
A��02��03��04
B��04��04��05
C��03��02��04
D��05��02��03
�ο��𰸣���1���й�������������ʱ���綯���Ż�ת��˵���������ܸ��ܹ��������ı仯����Ҫ04�������02����������
��2��������֪�����й�������������ʱ���綯���Ż�ת����˿�����Ϊ��J�����롱�ſ���������ѡ03��
��ѡ��C
���������
�����Ѷȣ�һ��
2�������� ��ͼ��ʾ�����ݿ������һ��ǿ�ų���ֱ�������Ÿ�Ӧǿ��B=0.2T������R1=R2=1�����ɶ�����ĵ���Ϊ0.5���������ĵ��費�ƣ�AB����Ϊ0.5m����AB��10m/s���ٶ������ƶ��Ĺ����У���
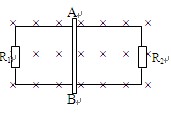
��1��AB���˵ĵ�ѹΪ���٣�
��2�����������Ĵ�СΪ���٣�
��3�������Ĺ���Ϊ�����ߣ�
�ο��𰸣���1��0.5V? (2)0.1N? (3)1W
�����������1��AB���˶������в����ĸ�Ӧ�綯��Ϊ ��AB�൱�ڵ�Դ��AB���˵ĵ�ѹΪ·�˵�ѹ������
��AB�൱�ڵ�Դ��AB���˵ĵ�ѹΪ·�˵�ѹ������
��2��ͨ��AB�ĸ�Ӧ����Ϊ�� ,�����ܵ��İ�����Ϊ
,�����ܵ��İ�����Ϊ ����ΪAB�������˶����������������Ϊ0.1N
����ΪAB�������˶����������������Ϊ0.1N
��3�����ݹ�ʽ �ɵã�
�ɵã�
��������Ҫע��AB���˵ĵ�ѹ��·�˵�ѹ�������⣬�Ƚϼ�
�����Ѷȣ�һ��
3������� ��ͼ��ʾ����Դ�ĵ綯��E��18V������r=1.0��������R2��5.0����R3��6.0����ƽ�н�����ˮƽ���ã�������d��2cm�����ɱ����R1�Ļ���ͷ�Ƶ�R1���е�ʱ����Դ��·�˵�ѹ��16V��һ��������q=��8.0��10��9C���͵�����ƽ��������֮�䡣��g��10m/s2����

��1��R1���ܵ��裻
��2���͵ε�������
��3���ƶ�R1�Ļ���ͷP���͵οɻ�����µ������ٶȡ�
�ο��𰸣���1��12��
��2��4.0��10��7kg
��3��1m/s2
�����������1����·���ܵ���Ϊ ��R2���˵�ѹΪUR2��I1R2��2��5V��10V��R1��R3�������ֵ�ѹΪUR3��UR1��U1��UR2��16V��10V��6V��ͨ��R3�ĵ���ΪIR3��UR3/R3��6/6��1A����ͨ��R1�ĵ���ΪIR1��I1��IR3��1A����R1�����·�еĵ���ΪR"1��UR1/IR1��6������ɱ������ܵ���ΪR1��2R"1��12����
��R2���˵�ѹΪUR2��I1R2��2��5V��10V��R1��R3�������ֵ�ѹΪUR3��UR1��U1��UR2��16V��10V��6V��ͨ��R3�ĵ���ΪIR3��UR3/R3��6/6��1A����ͨ��R1�ĵ���ΪIR1��I1��IR3��1A����R1�����·�еĵ���ΪR"1��UR1/IR1��6������ɱ������ܵ���ΪR1��2R"1��12����
��2�����������˵�ѹΪUC��UR2��10V����ƽ��������qUC/d��mg���͵�����Ϊm��qUC/dg��4.0��10-7kg��
��3��Ϊʹ���µļ��ٶ������ӦʹR1�Ļ���ͷ�Ƶ����϶ˣ���ʹ�糡����С����ʱR1��R3�IJ�������Ϊ ����R2���˵�ѹΪ
����R2���˵�ѹΪ �����������˵�ѹΪU"C��U"R2��9V����ţ�ٵڶ����ɵ�mg��qU"C/d��ma���͵����������ٶ�Ϊ
�����������˵�ѹΪU"C��U"R2��9V����ţ�ٵڶ����ɵ�mg��qU"C/d��ma���͵����������ٶ�Ϊ ��
��
�����Ѷȣ�һ��
4��ѡ���� ���ڵ綯�ƣ�����˵����ȷ���ǣ�?��
A���綯����ֵ�Ͼ͵��ڵ�Դ������֮��ĵ�ѹ
B�����е�Դ�ĵ綯�ƶ���1.5V
C�����Խ��ĵ�Դ����綯��һ��Խ��
D����ͬ��Դ�ĵ綯�Ʋ�ͬ
�ο��𰸣�D
��������������·�Ͽ�ʱ���綯����ֵ�Ͼ͵��ڵ�Դ������֮��ĵ�ѹ��A������ͬ��Դ�ĵ綯�Ʋ�ͬ��B��D�ԡ���Դ�綯��������أ�C����
�����Ѷȣ���
5�������� ��ͼ��ʾ������R1=R2=R3=4��,R4=12��,����C=10��F����Դ�綯��E=12V�����費�ƣ����ڹ��������У�����R2ͻȻ������·��
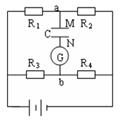
��:��1��ͨ��������G�ĵ����������(��N-G-b��b-G-N��ʾ)��
��2���ӵ���Ͽ�����·�ȶ��Ĺ����У����������Ƶĵ�����
�ο��𰸣���1��N��G��b��2��
�����������1�� ?��·ǰ����·��ͨ��
?��·ǰ����·��ͨ�� ?�ĵ���Ϊ
?�ĵ���Ϊ ?,��
?,�� ?���˵ĵ�ѹΪ6V����·ͨ��
?���˵ĵ�ѹΪ6V����·ͨ�� ?�ĵ���Ϊ
?�ĵ���Ϊ ?,��
?,�� ���˵ĵ�ѹΪ3V������a��ĵ���Ϊ6V��b��ĵ���Ϊ9V������N��ĵ��ƴ���M��ĵ��ƣ���·��˲��������ŵ磬��������ΪN��G��b
���˵ĵ�ѹΪ3V������a��ĵ���Ϊ6V��b��ĵ���Ϊ9V������N��ĵ��ƴ���M��ĵ��ƣ���·��˲��������ŵ磬��������ΪN��G��b
��2����·ǰ���������������Ϊ ,�ȶ�����������˵ĵ�ѹ����
,�ȶ�����������˵ĵ�ѹ���� ���˵�ѹ��Ϊ
���˵�ѹ��Ϊ �������ȶ������е�������磬ͨ�������Ƶĵ����Ϊ
�������ȶ������е�������磬ͨ�������Ƶĵ����Ϊ ������Ϊb-G-N,�����ܵ����Ϊ
������Ϊb-G-N,�����ܵ����Ϊ
�����������ǵ�·��ʽ��·�����ڵ��������ؼ����ѹ�������·�ȶ�ʱ���������ĵ�ѹ���ڵ�������һ·ͬ����������ĵ�ѹ֮�
�����Ѷȣ�һ��





 �����ʰ�
�����ʰ�




