1������� ij������ȤС��Ϊ�о���Ӧ���������ͼ��ʾ��װ�ã��⻬����MN��PQ��б�̶������㹻��ˮƽ�̶��Ĺ⻬����MR��PS��M��P����⻬���ӣ�ˮƽ���촦����ֱ�������ǿ�ų��У���ˮƽ�������లװ�С���Ӧ������������ṹ�а�����Ӧ��1����Ӧ��2���������������ֽ������A��ֱ���������ˮƽ�����ϣ��������������������������B ��ֱ��������б����ij�����ɾ�ֹ�ͷţ��������B����MP��ʱ������Ӧ��1��Ӧ�������������źŵ�������������˲�����������A��ʹ�䲻��ˮƽ�ƶ����������B�˶���CD��ʱ������Ӧ��2��Ӧ�������ͽ����źŵ�������������˲����������A��֮����������ڴų����˶�����ͼ��ʾ���������������Ϊma=mb=2kg,�ų��ĸ�Ӧǿ��ΪB=1T��MP CD��ľ���ΪL0=1m,�����L=1m,��������ĵ���Ϊ ��������費�ƣ�CD��AB������㹻�����B�ͷŵ�λ�õ�ˮƽ����ĸ߶�H=0.8m����g=10m/s2��������������λ��Ч���֣�
��������費�ƣ�CD��AB������㹻�����B�ͷŵ�λ�õ�ˮƽ����ĸ߶�H=0.8m����g=10m/s2��������������λ��Ч���֣�
С��1:��1������������Ӧ��2��ʱ���ٶȴ�С��
С��2:��2�����ڸ�Ӧ�������İ�װʹϵͳ����ʧ�Ļ�е�ܡ�
?
�ο��𰸣�
��1:��1��3.0m/s
��2:��2��1.2 J
��������������Ÿ�Ӧ�Ͷ����������ۺ�Ӧ�á������֪ʶ���У���Ÿ�Ӧ������ζ��ɣ������ڵ�Ÿ�Ӧ���ɣ������غ㣬������������е���غ㣬�����غ㣻�ۺ���ǿ����Ȼ������û����ʾ�õ���ζ��ɣ������������Ѿ�������һ֪ʶ��Ŀ��飬���ص�֪ʶ����ۺϷ��������Ŀ��飬�Ѷ���0.4���ҡ�
С��1:(1)�⣻�����B�»��Ĺ��̣��ɶ��ܶ����á� ��
��
������?������MP����CD��ʱΪt,���ɷ����ڵ�Ÿ�Ӧ���ɵ�
��һ�����е�ƽ����Ӧ�綯�ƴ�СΪ����
�� ������ƽ������
������ƽ������ ������
������
����һ���̣���ȴ�Ƕ��������ã�
���ϸ�ʽ�����ɵã������b����CDʱ���ٶȴ�СΪv1=3.0m/s
С��2:���������a������������������ɵ�ϵͳ�����غ㣬���������յĹ�ͬ�ٶȴ�СΪ��v2
���������������������������á�
����������������������û�а�װ��Ӧ�������������B����MP�����������ɵ�ϵͳ�������غ㡣
�������������������������ܴﵽ�Ĺ�ͬ�ٶ�Ϊ �����С�
������ ��
��
�������غ�á������ڰ�װ��Ӧ��������ʹ��ϵͳ����ʧ�Ļ�е��Ϊ
��
���ϸ�ʽ���������������ݵ�
�����Ѷȣ�һ��
2������� ��ͼ��ʾ��һ������Ϊ0.6kg����ƽ��AB��0.8m������˸���ˮƽ�����ϣ��������ļн�Ϊ370��������C��ֱ�̶�����֧���ϣ�֧�ܳ�OCΪ0.3m��֧���¶���ˮƽ�̶�ת��O���ӣ���ƽ��A�㴦��һ����Ϊ0.5kg��С����m�Գ���v0�ذ������˶���������ƽ���Ķ�Ħ������Ϊ0.2��gȡ10m/s2������
��1��ƽ�����ܵ����������أ�
��2��С�����˶�����B�˶�Զǡ��ʹƽ�巭ת��
��3����Ҫ��֤ƽ�岻������������ij��ٶ�v0���ܳ������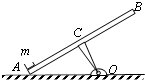
�ο��𰸣���1��ƽ������������MG=mgLG=0.6��10��0.3��0.6N?m=1.08?N?m
��2�����������C��ľ���ΪX����������ƽ���У�MN+Mf=MG
? m1gX?cos37��+��m1gL?cos37��=MG?
? �������ݣ����?X=0.21m
? ����B�˾���Ϊ0.4-0.21m=0.19?m
��3�����е�������ΪSm=0.4+0.21m=0.61m
�ɶ��ܶ�����-m1gSmsin37��-��m1gSm?cos37��=-12m1v02
�������ݣ����v0=3.04m/s
�𣺣�1��ƽ�����ܵ�����������Ϊ1.08N��m��
��2��С�����˶�����B��0.19mǡ��ʹƽ�巭ת��
��3����Ҫ��֤ƽ�岻������������ij��ٶ�v0���ܳ���3.04m/s��
���������
�����Ѷȣ�һ��
3��ʵ���� ��ͼ��ʾΪ���о��й̶�ת���������ƽ��������ʵ�飬�������ϸ�ͬ��Բ�ļ����ȡ���A��B����ֱ���ϸ���������ɹ��룬C����ϵ��ɳӺ�������ƽ�⡣��֪ÿ���������ܵ�������Ϊ1N��
��1����ʱ���ɳ�ʾ��Ϊ_____________N��B��ϸ�������ҵĹ������Ϊ_____________����
��2����ͬѧ�������ʵ��ʱ������˳ʱ������֮������ʱ������֮�ʹ��ڽϴ��࣬��鷢�ֶ����ͼ�����������ָ��������ֲ���һ������ԭ������ļ��鷽������������ʾ�����������±��ո��У�

�ο��𰸣���1��2.0��3��2��
���������
�����Ѷȣ�һ��
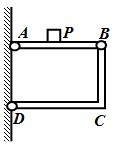
4��ѡ���� ֱ��AB��ֱ�����BCD����ͼ��ʾ���ӣ�A��B��D����Ϊ�������˼����������������ƣ�ABCD����һ�����Σ�������ΪG������Ϊ�ʵ��������ͼ��P����������
A��AB�˶�BCD�˵�������������BC��������
B��BCD�˶�AB�˵�������������DB����б����
C����AP�����BCD�˶�AB�˵����������
D����AP�����AB�˶�BCD�˵���������ת����D�����ز���





 �����ʰ�
�����ʰ�